










Awal tahun 2016 lalu sempat ramai di berbagai media tentang “manusia-robot” yang berasal dari Bali. Beliau dikabarkan merancang sendiri sebuah alat bantu untuk menggerakkan lengan kirinya yang lumpuh akibat stroke enam bulan sebelum mulai ramai diberitakan. Beberapa pemberitaan dan rekaman video yang beredar nampak meyakinkan bahwa alat tersebut benar-benar bekerja. Idenya untuk memperbaiki taraf hidup sangat patut diacungi jempol, namun banyak orang yang mengkritisi hasil temuannya. Berbagai ulasan ilmiah telah bermunculan menanggapi temuan yang menghebohkan itu, ada yang langsung menghakimi dan mencemooh secara negatif, namun ada pula yang membahas secara sangat positif dan penuh baik sangka (Laksono 2016; Nugroho 2016; Soni 2016). Bahkan ada yang mengulas dari sudut pandang disabilitas dan kaitannya dngan kesehatan, pemerintah, kebijakan publik dan dinas sosial (Nugraha 2016). Untuk melengkapi berbagai ulasan yang umumnya muncul dari sudut pandang teknik, melalui tulisan ini kami mencoba mengulas dari sisi multidisiplin teknik biomedika (biomedical engineering) yang kebetulan kami dalami, agar bisa kita kritisi bersama secara objektif dan holistik.
Otak dan tubuh manusia
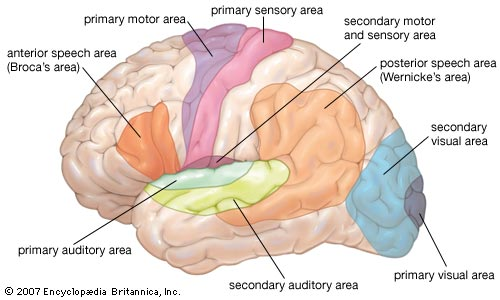
Tubuh manusia merupakan sistem yang kompleks. Tiap bagian dari tubuh mempunyai peran yang dapat bekerja mandiri dan juga beberapa bagian tubuh dapat bekerja sama untuk melakasanakan sebuah tugas. Misalnya saja untuk mengambil gelas. Mata melihat dimana posisi benda, kemudian kita menggerakkan tangan hingga mencapai posisi tersebut. Kemudian kita menggerakan jemari kita untuk menggenggam gelas hingga cukup kuat. Dalam gerakan yang sederhana ini kita sudah melibatkan mata, otot tangan, dan perasa tekanan pada telapak tangan. Koordinasi bagian-bagian tubuh ini dilakukan oleh bagian kecil dari otak.
[caption caption="Pembagian otak berdasarkan fungsinya. (diambil dari Encyclopedia Britannica 2007)"][/caption]
Otak manusia dewasa terdiri lebih dari 120 milliar sel saraf dan sel neuroglia yang berjumlah 10 kali lebih banyak dari sel saraf itu sendiri (Andersen et al 1992). Organ yang sangat kompleks ini terdiri dari beberapa bagian yang memiliki fungsinya masing-masing. Selain mengatur gerakan anggota tubuh manusia (motoris), otak memampukan kita untuk mengindera lingkungan (pengelihatan, pendengaran, peraba), berbicara dan berkomunikasi, berhitung, mengapresiasi seni, dan lainnya. Bila sebagian dari sel saraf pada otak tidak bekerja baik tentu kemampuan-kemampuan tersebut menjadi terhambat atau kehilangan fungsi secara total.
Apakah stroke itu?
Dalam kasus seseorang yang terserang stroke, sebagian dari sel saraf pada otak mati karena kekurangan asupan darah atau pendarahan pada otak. Biasanya, bagian otak yang terkena dampak adalah bagian yang mengatur pergerakan anggota tubuh. Karena itu, banyak dari pasien yang selamat dari serangan stroke namun mengalami kelumpuhan baik hanya sebagian wajah, sebelah lengan atau kaki, ataupun separuh badan. Akibat dari stroke ini tidak hanya membuat anggota tubuh menjadi terbatas pergerakkannya, tetapi juga membuat bagian yang terdampak hilangan massa ototnya dan mengecil (Jørgensen & Jacobsen 2001). Efek selanjutnya akibat otot yang mengecil adalah bagian dari anggota tubuh tersebut akan menekuk sesuai arah persendiannya. Misalnya untuk kasus pada tangan, tangan akan menekuk ke dalam seperti saat mendekap buku pada dada.
Adakah kemungkinan untuk mengembalikan fungsi gerak anggota tubuh tersebut?
Bila bagian otak yang mati tidak terlalu luas, maka ada kemungkinan fungsi gerak bagian tubuh tersebut bisa didapat kembali dalam waktu yang bergantung dengan kecepatan regenerasi sel dan dibantu dengan latihan fisik. Bila kerusakannya terlalu luas, alat bantu seperti rangka luar (eksoskeleton) ataupun perangkat lainnya dapat digunakan.
Orthosis, prosthesis, dan eksoskeleton
Alat untuk menunjang bagian tubuh tersebut digolongkan sebagai orthosis dan orthose. Pada bagian tubuh yang tidak hilang, orthose bisa dipasang untuk membantu fungsi gerak. Jika bagian tubuh hilang, seorang pasien bisa menggunakan prosthetik/prosthesis: anggota tubuh buatan. Pada kasus stroke, tangan tak perlu diamputasi, jadi pasien yang membutuhkan bantuan genggam atau menekuk sendi, bisa dibantu dengan orthosis tangan. Pada kasus Pak Tawan, dengan asumsi bahwa tangannya tidak lumpuh total, maka beliau membutuhkan orthosis untuk menggerakkan lengan bawah, memutar pergelangan tangan, dan menggerakan jemari agar dapat menggenggam. Dengan alat bantu ini, beliau akan mampu mandiri dalam bekerja.
Berdasarkan sifatnya, eksoskeleton dapat dikategorikan ke pasif yaitu alat bantu yang tidak berinteraksi dengan pemakai misalnya hanya menggunakan pegas dan system mekanik lainnya (Brokaw et al 2011), dan aktif yaitu alat bantu yang dapat dikendalikan oleh pemakai. Tentunya jenis yang kedua akan membuat gerakan pemakai lebih natural dan fleksibel. Sampai saat ini ada dua metode yang banyak dikembangkan untuk mengendalikan eksoskeleton secara aktif: 1) dengan menggunakan sinyal dari otak (EEG, electroencephalography), atau 2) dengan menggunakan sinyal dari otot (EMG, electromyography) (Pons 2008). Berhubung Pak Tawan mengaku menggunakan sinyal EEG untuk menggerakkan tangan robotnya, kami akan bahas EEG lebih lanjut.
Sistem eksoskeleton menggunakan sinyal dari otak menggunakan teknologi yang disebut dengan Brain Machine Interface, yaitu system yang berusaha menerjemahkan sinyal dari otak sebagai komando dari sebuah alat untuk melakukan tugas tertentu. Oleh karena itu, harus ada tiga bagian utama agar alat ini dapat berfungsi, yaitu:
- bagian yang menangkap sinyal dari otak (bagian akuisisi data),
- bagian yang menerjemahkan (atau pengolah data), dan
- bagian yang melakukan kerja (disebut juga aktuator).
Merekam sinyal otak
Pertama-tama dibutuhkan elektroda yang ditempelkan pada kepala untuk mengangkap sinyal dari otak / EEG. Sinyal ini adalah hasil fluktuasi ion dari neuron-neuron yang sangat sibuk di otak. Karena sinyal ini sangat lemah (kisaran mikroVolt - sepersejuta Volt), maka dibutuhkan elektroda dengan kualitas yang memadai. Terdapat berbagai jenis elektroda yang dapat digunakan: 1) elektroda infasif di bawah kulit kepala, 2) non-infasif elektroda tempel di atas kulit dengan menggunakan gel konduktif, serta 3) elektroda kering tanpa gel (Taheri et al 1994; Fonsesca et al 2007). Tentunya setiap jenis elektroda memiliki kelebihan dan kekurangan masing-masing.
Meskipun dalam literatur disebutkan bahwa untuk kebutuhan fungsi motoris sederhana membutuhkan enam elektroda kering (Popescu et al 2007), dalam fungsi yang lebih sederhana misal hanya untuk memberikan kendali menyalakan atau mematikan sebuah sistem, satu elektroda juga dapat digunakan.
Dari cuplikan gambar di bawah, tidak terlihat adanya elektroda di bagian belakang maupun samping kanan atau kiri dari ikat kepala yang beliau gunakan (hanya terdapat kabel). Kemungkinannya elektroda ditempatkan di bagian depan. Namun, pada bagian depan hanya terlihat bagian berwarna hitam yang cukup lebar. Sehingga kemungkinannya adalah beliau hanya menggunakan satu atau dua buah elektroda dan ini dapat dimanfaatkan untuk menggerakkan lengan bawah, pergelangan tangan dan jemari.
[caption caption="Ini adalah cuplikan sebuah video yang menunjukkan aksesori yang dikenakan pada kepala untuk merekam sinyal otak. (https://youtu.be/ehhaLsz_7D4)"]

Menerjemahkan sinyal otak
Sinyal EEG selalu berubah dalam setiap kondisi dan aktivitas, bahkan dalam keadaan istirahat (resting state). Sinyal ini dapat diterjemahkan ke dalam osilasi berbagai gelombang otak: Alpha, Beta, Gamma, Theta, Delta, serta Mu yang masing-masing memiliki karakteristik frekuensi dan terkait aktifitas serta tingkat kesadaran.
- Sinyal Alpha (Berger, 1969). Gelombang alpha adalah sinyal EEG yang berosilasi pada frekuensi 8-15 Hz dan dideteksi dari bagian occipital (kepala belakang). Bagian ini berhubungan dengan bagian otak untuk fungsi visual. Ketika mata terbuka, gelombang alpha melemah. Pada kondisi relaks, gelombang ini menguat. Dengan mengatur diri supaya relaks atau berkonsentrasi, seseorang bisa mengatur gelombang alpha, untuk kemudian mengendalikan suatu sistem Brain-Machine Interface.
- Sinyal Mu ( Pfurtscheller & da Silva, 1999). Gelombang Mu adalah sinyal EEG yang memiliki frekuensi mirip dengan alpha (8-13 Hz), tetapi dideteksi pada bagian sentral (mahkota/puncak kepala). Bagian ini berhubungan dengan bagian otak untuk fungsi motorik. Ketika seseorang menggerakkan anggota tubuh atau membayangkan gerakan tersebut, gelombang mu akan mengalami desinkronisasi (melemah). Proses membayangkan gerakan tubuh disebut sebagai “motor imagery”. Supaya suatu eksoskeleton tangan bisa dikendalikan oleh imajinasi gerakan tangan, sistem Brain-Machine Interface harus mampu menerjemahkan gelombang Mu.
- N400 (Luck 2005). N400 adalah suatu komponen EEG, yang terikat oleh waktu dan tergantung oleh stimulus. N400 termasuk “event related potential”, yang berarti potensial yang tergantung oleh suatu event/stimulus. Huruf N berarti potensial negatif dan 400 berarti sekitar 400 ms (250-500 ms) setelah stimulus diberikan. Sinyal N400 bisa dideteksi pada bagian centro-parietal kepala. Sinyal ini dipakai untuk mengamati anomali linguistik. Contoh kalimat yang bukan anomali ialah “Saya makan mie dengan baso”, sedangkan contoh kalimat yang anomali ialah “Saya makan mie dengan ban”. Anomali linguistik juga terjadi ketika seseorang berbohong. Ketika terdapat anomali linguistik, sinyal N400 mengalami perbedaan. Dengan menerjemahkan sinyal ini, seseorang bisa mengendalikan suatu Brain-Machine Interface.
Dengan transformasi Fourier, sinyal-sinyal tersebut kemudian dapat dipecah ke komponen frekuensi untuk mendeteksi aktivitas otak. Selanjutnya untuk mengklasifikasi sinyal, dibutuhkan metode seperti linear classifiers, nonlinear Bayesian classifiers, nearest neighbor classifiers, neural networks, atau combination of classifiers (Lotte et al, 2007). Yang paling sering digunakan adalah artificial neural network / sistem syaraf buatan.
Kembali ke kasus Pak Tawan, ia mengaku tangan robot yang ia buat diaktivasi dengan sistem pendeteksi kebohongan (lie detector). Alat untuk mendeteksi kebohongan biasanya memanfaatkan EEG atau ECG (electrocardiogram atau sinyal listrik dari jantung). Bila sistem bekerja berdasarkan sinyal EEG, pengguna perlu berlatih mental imagery - sebuah kegiatan membayangkan sesuatu tanpa adanya rangsangan dari luar. Mental imagery ini akan mengubah sinyal EEG N400 yang kemudian dideteksi oleh sistem dan digunakan untuk memberikan perintah pada lengan robot. Perintah tersebut dapat berupa kendali untuk menggerakkan lengan bawah atau menekuk jemari.
Karena setiap orang memiliki sinyal EEG yang unik, maka bila sistem tersebut dapat digunakan oleh Pak Tawan, belum tentu orang lain dapat menggunakan alat yang sama. Selain itu, setiap pemakai perlu melatih diri untuk menyesuaikan mental imagery seperti yang dijelaskan di atas.
Desain aktuator
Teknik paling sederhana adalah menggunakan sinyal otak ini sebagai saklar ON-OFF dari sebuah aktuator. Jadi bila melewati nilai tertentu, maka aktuator akan bekerja dan bila kurang dari nilai tersebut, maka aktuator akan berhenti bekerja. Hanya saja dengan teknik ini, gerakan akan menjadi terbata-bata bila digunakan untuk menggerakan aktuator ke beberapa posisi. Bila hanya dua posisi, hal ini tidak akan terlihat.
Mengingat kebutuhan Pak Tawan, maka paling tidak ada dua buah aktuator yang diperlukan yaitu untuk menggerakan lengan bawah dan menggerakan jemari. Untuk menggerakkan lengan bawah, aktuator harus mampu mengangkat beban lengan bawah dan juga prediksi beban lainnya (misal benda yang akan dilas). Total beban yang dapat diprediksi adalah 20 kg atau ±200 N (rata-rata berat lengan bawah orang dewasa adalah 4 kg). Rangka pada salah satu sisi mungkin cukup bila dimensi rangka tersebut tebal, namun bisa kita lihat dalam video maupun gambar yang beredar, ketebalan rangka yang beliau gunakan hanya berkisar 2-3 mm pada salah satu sisi dan dibantu dengan sebuah piston berdiameter tidak lebih dari 2 cm (satu ruas jari). Untuk menambah kestabilan, maka dianjurkan untuk menambah rangka pada bagian dalam lengan.
Melihat struktur selang dan perangkat yang beliau gunakan piston ini tampaknya digerakkan dengan kompresi angin (pneumatik). Standar tekanan angin yang biasa digunakan adalah 6 bar. Kita dapat menghitung besar gaya yang bisa dihasilkan oleh satu piston dengan mengalikan nilai tekanan tersebut dengan luas penampang silinder dan dikalikan dengan 10. Besar gaya yang mampu dilakukan oleh sebuah piston seperti yang digunakan oleh beliau adalah 188 N. Dengan kata lain, alat tersebut dirancang untuk mengangkat beban maksimum 15-17 kg.
[caption caption="Gambar ini menunjukkan rangka 'eksoskeleton' yang digunakan. (https://youtu.be/XPcZH8eTIas)"]

Dengan konfigurasi ini, maka fungsi untuk menggerakkan lengan bawah dapat terpenuhi. Lalu bagaimanakah cara menggerakkan jemari dan pergelangan tangan seperti nampak pada cuplikan sekuen gambar berikut?
Untuk dapat menggerakkan pergelangan tangan, perlu sebuah struktur yang terhubung dengan roda gigi dan sebuah motor. Struktur ini dapat diletakkan pada ujung penyangga lengan bawah sehingga bila pergelangan tangan Pak Tawan difiksasi pada bagian ini dan dikendalikan dengan sebuah sinyal ON-OFF, maka pergelangan tangan dapat bergerak seperti pada gambar.
[caption caption="Dengan alat bantu ini, Pak Tawan juga mampu untuk memutar telapak tangannya. (tps://www.facebook.com/inthenowrt/videos/567662026717504)"]

Bagaimana dengan menekuk jemari? Ada dua pilihan yang dapat digunakan: menggunakan aktuator pneumatik atau aktuator dengan sistem roda gigi. Dengan aktuator pneumatik atau aktuator dengan sistem roda gigi, perlu dirancang struktur yang memungkinkan jemari dapat ditekuk di ketiga ruasnya.
Penutup
Kami mencoba menjabarkan dengan detail kemungkinan cara kerja “tangan robot” Pak Tawan. Namun tentu saja kekurangan terbesar ulasan ini adalah kami tidak dapat melihat langsung ke lokasi, sehingga tulisan ini tidak lepas dari beberapa asumsi dari hasil melihat video rekaman serta berbagai ulasan berita. Yang jelas Pak Tawan berhasil membuat para pembaca kritis semakin penasaran dan menggali sendiri banyak hal tentang EEG, BCI, robotik, kelumpuhan akibat stroke, dan lain-lain - tentunya dari berbagai sumber ilmiah yang terpercaya. Semoga di tengah gempuran berita media online yang dramatis, masyarakat indonesia bisa selalu kritis dalam menyerap informasi yang datang dari media dan tidak mudah latah mengamini atau menghakimi tanpa melakukan cross-check terlebih dahulu.
Satu hal yang menginspirasi kami untuk membuat ulasan ini adalah karena kekhawatiran melihat banyaknya orang yang langsung latah percaya dari hanya membaca berita online. Serta sangat gemas melihat media yang memberitakan secara bertubi-tubi, bombastis penuh bumbu tanpa mau repot menuliskan secara baik dan benar. Bisa jadi alat tersebut berfungsi dengan baik, namun karena wartawan menuliskan dengan redaksional yang sangat buruk - banyaknya istilah teknis maupun medis yang salah tulis serta penjelasan yang salah konsep, akhirnya para pembaca yang kritis jadi amat sangat skeptis. Jadi apa fungsinya bagian editor di sebuah media?
Kesimpulan kami, alat tersebut pada dasarnya memungkinkan untuk dibuat dan cukup untuk kebutuhan Pak Tawan, namun dengan dukungan teknologi yang lebih mapan tentunya alat orthosis ini bisa disempurnakan agar bisa bermanfaat untuk jangka lebih panjang dan bahkan untuk lebih banyak orang lagi yang membutuhkan. Terkait dengan penyempurnaan teknologi, bisa diartikan riset/penelitian lebih lanjut. Untuk hal ini, kita bisa merefleksikan pada dokumen Global Disability Action Plan (GDAP) 2014-2021: Better Health for People with Disability (WHO, 2014) yang telah diadopsi oleh World Health Organization (WHO) saat World Health Assembly pada bulan Mei 2014 yang disetujui oleh negara-negara anggota WHO, termasuk Indonesia. Dalam dokumen GDAP tersebut, ada tiga tujuan utama: (1) Menghilangkan hambatan-hambatan dan meningkatkan akses ke pelayanan kesehatan dan program-programnya untuk penyandang disabilitas. (2) Menguatkan dan memperluas rehabilitasi, habilitasi, alat-alat bantu teknologi dan pendukungnya, serta rehabilitasi berdasarkan komunitas (3) Menguatkan pengumpulan data yang relevan dan terkomparasi secara internasional serta mendukung riset terkait disabilitas dan pelayanan yang terkait. Dari tujuan yang tertera pada nomor 3, riset untuk kemajuan teknologi alat-alat bantu untuk penyandang disabilitas sehingga mencapai standar yang baik adalah salah satu poin penting, sehingga bisa membantu kehidupan sehari-hari penyandang disabilitas secara umum.
Kita berharap penelitian terkait penyandang disabilitas, termasuk teknologi alat bantu untuk penyandang disabilitas di Indonesia semakin maju kedepannya dengan mendapat dukungan penuh dari pemerintah sehingga dapat membantu Pak Tawan-Pak Tawan lain di Indonesia!
Daftar Pustaka
Andersen, B. B., Korbo, L. & Pakkenberg, B. A quantitative study of the human cerebellum with unbiased stereological techniques. The Journal of Comparative Neurology J. Comp. Neurol. 326, 549–560 (1992).
Brokaw, E. B., Black, I., Holley, R. J. & Lum, P. S. Hand Spring Operated Movement Enhancer (HandSOME): A Portable, Passive Hand Exoskeleton for Stroke Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. IEEE Transactions on Neural Systems and Rehabilitation Engineering 19, 391–399 (2011).
Classification of EEG Signals in a Brain-Computer Interface System. Classification of EEG Signals in a Brain-Computer Interface System at
Fonseca, C. et al. A Novel Dry Active Electrode for EEG Recording. IEEE Transactions on Biomedical Engineering IEEE Trans. Biomed. Eng. 54, 162–165 (2007).
How Brain-computer Interfaces Work. HowStuffWorks (2007). at
Jørgensen, L. & Jacobsen, B. Changes in muscle mass, fat mass, and bone mineral content in the legs after stroke: a 1 year prospective study. Bone 28, 655–659 (2001).
Laksono, N, et al. Investigasi: “Lengan Robotik Bali, Inovasi Sejati atau Dusta Belaka?” Penggagas (2016). at
Luck, S. J. An introduction to the event-related potential technique. (MIT Press, 2005).
Nugraha, B. Pak Tawan dan Disabilitas. https://nugrahannover.wordpress.com/2016/01/31/pak-tawan-dan-disabilitas/ (2016)
Nugroho, Y. Facebook. Iron Man Bali Cuma Hoax? at (2016)
Pfurtscheller, G. & Silva, F. L. D. Event-related EEG/MEG synchronization and desynchronization: basic principles. Clinical Neurophysiology 110, 1842–1857 (1999).
Pons, J. L., Ceres, R. & Caldern, L. Introduction to Wearable Robotics. Wearable Robots 1–16 doi:10.1002/9780470987667.ch1
Popescu, F., Fazli, S., Badower, Y., Blankertz, B. & Müller, K.-R. Single Trial Classification of Motor Imagination Using 6 Dry EEG Electrodes. PLoS ONE 2, (2007).
Soni, A. Mengungkap Rahasia Lengan Robot Bli Tawan - KOMPASIANA.com (2016). KOMPASIANA at
Taheri, B. A., Knight, R. T. & Smith, R. L. A dry electrode for EEG recording. Electroencephalography and Clinical Neurophysiology 90, 376–383 (1994).
World Health Organization. 2014. Global Disability Action Plan: 2014-2021: Better Health for People with Disability. Geneva, (2014).
Penulis
Subaryani D. H. Soedirdjo - PhD student in Biomedical Engineering, Politecnico di Torino, Turin, Italy
Prasandhya Astagiri Yusuf - PhD student, Hannover Medical School, Institute of AudioNeuroTechnology (VIANNA), Germany
Ignatius Sapto Condro - PhD student, University of Oldenburg, Germany
Boya Nugraha, MS, PhD - Dept. Rehabilitation Medicine, Hannover Medical School, Germany
