





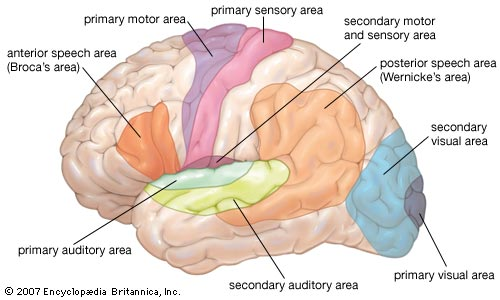


Kembali ke kasus Pak Tawan, ia mengaku tangan robot yang ia buat diaktivasi dengan sistem pendeteksi kebohongan (lie detector). Alat untuk mendeteksi kebohongan biasanya memanfaatkan EEG atau ECG (electrocardiogram atau sinyal listrik dari jantung). Bila sistem bekerja berdasarkan sinyal EEG, pengguna perlu berlatih mental imagery - sebuah kegiatan membayangkan sesuatu tanpa adanya rangsangan dari luar. Mental imagery ini akan mengubah sinyal EEG N400 yang kemudian dideteksi oleh sistem dan digunakan untuk memberikan perintah pada lengan robot. Perintah tersebut dapat berupa kendali untuk menggerakkan lengan bawah atau menekuk jemari.
Karena setiap orang memiliki sinyal EEG yang unik, maka bila sistem tersebut dapat digunakan oleh Pak Tawan, belum tentu orang lain dapat menggunakan alat yang sama. Selain itu, setiap pemakai perlu melatih diri untuk menyesuaikan mental imagery seperti yang dijelaskan di atas.
Desain aktuator
Teknik paling sederhana adalah menggunakan sinyal otak ini sebagai saklar ON-OFF dari sebuah aktuator. Jadi bila melewati nilai tertentu, maka aktuator akan bekerja dan bila kurang dari nilai tersebut, maka aktuator akan berhenti bekerja. Hanya saja dengan teknik ini, gerakan akan menjadi terbata-bata bila digunakan untuk menggerakan aktuator ke beberapa posisi. Bila hanya dua posisi, hal ini tidak akan terlihat.
Mengingat kebutuhan Pak Tawan, maka paling tidak ada dua buah aktuator yang diperlukan yaitu untuk menggerakan lengan bawah dan menggerakan jemari. Untuk menggerakkan lengan bawah, aktuator harus mampu mengangkat beban lengan bawah dan juga prediksi beban lainnya (misal benda yang akan dilas). Total beban yang dapat diprediksi adalah 20 kg atau ±200 N (rata-rata berat lengan bawah orang dewasa adalah 4 kg). Rangka pada salah satu sisi mungkin cukup bila dimensi rangka tersebut tebal, namun bisa kita lihat dalam video maupun gambar yang beredar, ketebalan rangka yang beliau gunakan hanya berkisar 2-3 mm pada salah satu sisi dan dibantu dengan sebuah piston berdiameter tidak lebih dari 2 cm (satu ruas jari). Untuk menambah kestabilan, maka dianjurkan untuk menambah rangka pada bagian dalam lengan.
Melihat struktur selang dan perangkat yang beliau gunakan piston ini tampaknya digerakkan dengan kompresi angin (pneumatik). Standar tekanan angin yang biasa digunakan adalah 6 bar. Kita dapat menghitung besar gaya yang bisa dihasilkan oleh satu piston dengan mengalikan nilai tekanan tersebut dengan luas penampang silinder dan dikalikan dengan 10. Besar gaya yang mampu dilakukan oleh sebuah piston seperti yang digunakan oleh beliau adalah 188 N. Dengan kata lain, alat tersebut dirancang untuk mengangkat beban maksimum 15-17 kg.
[caption caption="Gambar ini menunjukkan rangka 'eksoskeleton' yang digunakan. (https://youtu.be/XPcZH8eTIas)"]

Dengan konfigurasi ini, maka fungsi untuk menggerakkan lengan bawah dapat terpenuhi. Lalu bagaimanakah cara menggerakkan jemari dan pergelangan tangan seperti nampak pada cuplikan sekuen gambar berikut?
Untuk dapat menggerakkan pergelangan tangan, perlu sebuah struktur yang terhubung dengan roda gigi dan sebuah motor. Struktur ini dapat diletakkan pada ujung penyangga lengan bawah sehingga bila pergelangan tangan Pak Tawan difiksasi pada bagian ini dan dikendalikan dengan sebuah sinyal ON-OFF, maka pergelangan tangan dapat bergerak seperti pada gambar.
[caption caption="Dengan alat bantu ini, Pak Tawan juga mampu untuk memutar telapak tangannya. (tps://www.facebook.com/inthenowrt/videos/567662026717504)"]

Bagaimana dengan menekuk jemari? Ada dua pilihan yang dapat digunakan: menggunakan aktuator pneumatik atau aktuator dengan sistem roda gigi. Dengan aktuator pneumatik atau aktuator dengan sistem roda gigi, perlu dirancang struktur yang memungkinkan jemari dapat ditekuk di ketiga ruasnya.
