






Berdasarkan sifatnya, eksoskeleton dapat dikategorikan ke pasif yaitu alat bantu yang tidak berinteraksi dengan pemakai misalnya hanya menggunakan pegas dan system mekanik lainnya (Brokaw et al 2011), dan aktif yaitu alat bantu yang dapat dikendalikan oleh pemakai. Tentunya jenis yang kedua akan membuat gerakan pemakai lebih natural dan fleksibel. Sampai saat ini ada dua metode yang banyak dikembangkan untuk mengendalikan eksoskeleton secara aktif: 1) dengan menggunakan sinyal dari otak (EEG, electroencephalography), atau 2) dengan menggunakan sinyal dari otot (EMG, electromyography) (Pons 2008). Berhubung Pak Tawan mengaku menggunakan sinyal EEG untuk menggerakkan tangan robotnya, kami akan bahas EEG lebih lanjut.
Sistem eksoskeleton menggunakan sinyal dari otak menggunakan teknologi yang disebut dengan Brain Machine Interface, yaitu system yang berusaha menerjemahkan sinyal dari otak sebagai komando dari sebuah alat untuk melakukan tugas tertentu. Oleh karena itu, harus ada tiga bagian utama agar alat ini dapat berfungsi, yaitu:
- bagian yang menangkap sinyal dari otak (bagian akuisisi data),
- bagian yang menerjemahkan (atau pengolah data), dan
- bagian yang melakukan kerja (disebut juga aktuator).
Merekam sinyal otak
Pertama-tama dibutuhkan elektroda yang ditempelkan pada kepala untuk mengangkap sinyal dari otak / EEG. Sinyal ini adalah hasil fluktuasi ion dari neuron-neuron yang sangat sibuk di otak. Karena sinyal ini sangat lemah (kisaran mikroVolt - sepersejuta Volt), maka dibutuhkan elektroda dengan kualitas yang memadai. Terdapat berbagai jenis elektroda yang dapat digunakan: 1) elektroda infasif di bawah kulit kepala, 2) non-infasif elektroda tempel di atas kulit dengan menggunakan gel konduktif, serta 3) elektroda kering tanpa gel (Taheri et al 1994; Fonsesca et al 2007). Tentunya setiap jenis elektroda memiliki kelebihan dan kekurangan masing-masing.
Meskipun dalam literatur disebutkan bahwa untuk kebutuhan fungsi motoris sederhana membutuhkan enam elektroda kering (Popescu et al 2007), dalam fungsi yang lebih sederhana misal hanya untuk memberikan kendali menyalakan atau mematikan sebuah sistem, satu elektroda juga dapat digunakan.
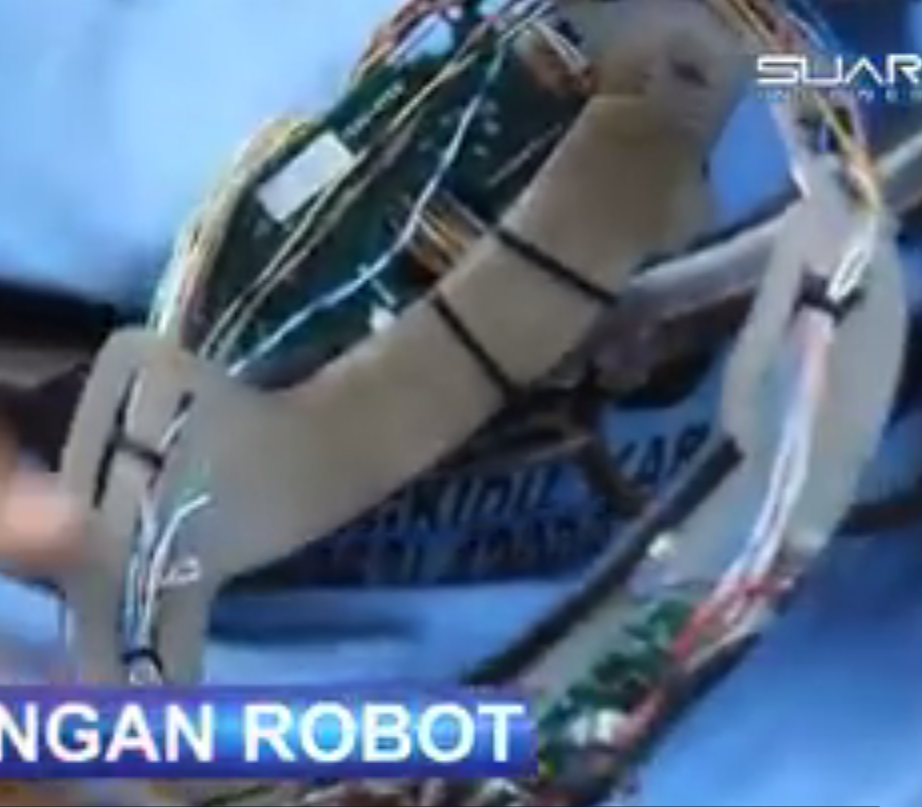
Dari cuplikan gambar di bawah, tidak terlihat adanya elektroda di bagian belakang maupun samping kanan atau kiri dari ikat kepala yang beliau gunakan (hanya terdapat kabel). Kemungkinannya elektroda ditempatkan di bagian depan. Namun, pada bagian depan hanya terlihat bagian berwarna hitam yang cukup lebar. Sehingga kemungkinannya adalah beliau hanya menggunakan satu atau dua buah elektroda dan ini dapat dimanfaatkan untuk menggerakkan lengan bawah, pergelangan tangan dan jemari.
[caption caption="Ini adalah cuplikan sebuah video yang menunjukkan aksesori yang dikenakan pada kepala untuk merekam sinyal otak. (https://youtu.be/ehhaLsz_7D4)"]

Menerjemahkan sinyal otak
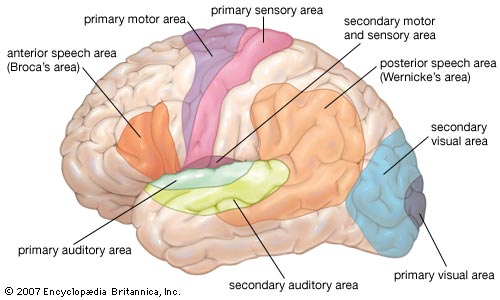
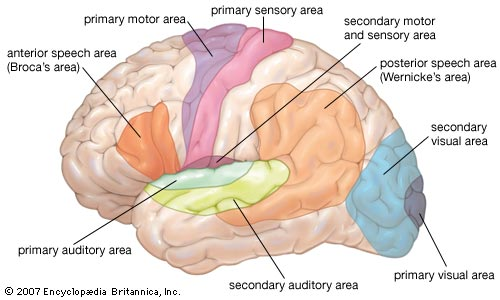
Sinyal EEG selalu berubah dalam setiap kondisi dan aktivitas, bahkan dalam keadaan istirahat (resting state). Sinyal ini dapat diterjemahkan ke dalam osilasi berbagai gelombang otak: Alpha, Beta, Gamma, Theta, Delta, serta Mu yang masing-masing memiliki karakteristik frekuensi dan terkait aktifitas serta tingkat kesadaran.
- Sinyal Alpha (Berger, 1969). Gelombang alpha adalah sinyal EEG yang berosilasi pada frekuensi 8-15 Hz dan dideteksi dari bagian occipital (kepala belakang). Bagian ini berhubungan dengan bagian otak untuk fungsi visual. Ketika mata terbuka, gelombang alpha melemah. Pada kondisi relaks, gelombang ini menguat. Dengan mengatur diri supaya relaks atau berkonsentrasi, seseorang bisa mengatur gelombang alpha, untuk kemudian mengendalikan suatu sistem Brain-Machine Interface.
- Sinyal Mu ( Pfurtscheller & da Silva, 1999). Gelombang Mu adalah sinyal EEG yang memiliki frekuensi mirip dengan alpha (8-13 Hz), tetapi dideteksi pada bagian sentral (mahkota/puncak kepala). Bagian ini berhubungan dengan bagian otak untuk fungsi motorik. Ketika seseorang menggerakkan anggota tubuh atau membayangkan gerakan tersebut, gelombang mu akan mengalami desinkronisasi (melemah). Proses membayangkan gerakan tubuh disebut sebagai “motor imagery”. Supaya suatu eksoskeleton tangan bisa dikendalikan oleh imajinasi gerakan tangan, sistem Brain-Machine Interface harus mampu menerjemahkan gelombang Mu.
- N400 (Luck 2005). N400 adalah suatu komponen EEG, yang terikat oleh waktu dan tergantung oleh stimulus. N400 termasuk “event related potential”, yang berarti potensial yang tergantung oleh suatu event/stimulus. Huruf N berarti potensial negatif dan 400 berarti sekitar 400 ms (250-500 ms) setelah stimulus diberikan. Sinyal N400 bisa dideteksi pada bagian centro-parietal kepala. Sinyal ini dipakai untuk mengamati anomali linguistik. Contoh kalimat yang bukan anomali ialah “Saya makan mie dengan baso”, sedangkan contoh kalimat yang anomali ialah “Saya makan mie dengan ban”. Anomali linguistik juga terjadi ketika seseorang berbohong. Ketika terdapat anomali linguistik, sinyal N400 mengalami perbedaan. Dengan menerjemahkan sinyal ini, seseorang bisa mengendalikan suatu Brain-Machine Interface.
Dengan transformasi Fourier, sinyal-sinyal tersebut kemudian dapat dipecah ke komponen frekuensi untuk mendeteksi aktivitas otak. Selanjutnya untuk mengklasifikasi sinyal, dibutuhkan metode seperti linear classifiers, nonlinear Bayesian classifiers, nearest neighbor classifiers, neural networks, atau combination of classifiers (Lotte et al, 2007). Yang paling sering digunakan adalah artificial neural network / sistem syaraf buatan.
